当前高高原中止进近之后的CPC转换程序存在的问题
2024/12/7 飞行技术 次 0 条
先插入一个我自己开发的CPC转换提醒器的广告,详情点击:“飞行员专用座舱高度监控报警器”
进入主题之前我先说一个很多人对于CPC转换的误解。可能很多人都认为CPC转换的作用是强制让备用CPC跟主用CPC“同步”,其实这个理解是不正确的。转换CPC并不会立刻让两部CPC的工作模式同步,每一部CPC原本处于什么模式,转换之后还是什么模式。既然这样,那为什么在下降之后当座舱高度达到8500ft的时候进行一次CPC转换能有效避免虚假的“座舱高度过高”警告呢?我来仔细分析一下这个CPC转换程序背后的逻辑:
飞机正常下降之后当座舱高度开始上升,说明这时候主用CPC已经进入了下降模式。但这时候备用CPC却不一定也进入了下降模式,也就是所谓的“不同步”或者叫“延迟”,此时有两种可能性:
A.备用CPC也进入了下降模式
B.备用CPC还停留在巡航模式
平时飞行时大多数情况都是A,在这种情况下就算不转换也不会触发警告,不过转换一下也没坏处。
如果是情况B,只要飞机持续保持下降,备用CPC还是会探测到飞机已下降,从而进入下降模式,转换时机虽有延迟但大多数时候也不会延迟到座舱高度达到9550ft的报警高度,所以也不会出现警告。这就是为什么在以前,大家虽然都没有做8500转换CPC的程序,也很少出现这个假警告。
只有在极少数情况下,当主用CPC进入到了下降模式而备用CPC还停留在巡航模式正巧又遇到飞机改平,那么备用CPC就会一直停留在巡航模式,主用CPC因为在下降模式,会控制座舱高度一直上升,当上升到9550ft的时候,备用CPC就会发出警告。
在这种情况下,只要在座舱高度达到9550ft之前进行一次CPC的转换,就能使原本卡在巡航模式的CPC变成主用,转换之后处于巡航模式的主用CPC会控制座舱高度从上升转为下降,座舱高度不会达到9550ft,于是避免了触发警告。随后当飞机转入下降,这部停留在巡航模式的CPC迟早也会探测到下降,所以座舱高度又会从8000ft再次上升,这时候也不用担心到了9550ft会触发警告了,因为两部CPC都已经是下降模式了。
CPC转换这个动作并不能直接使两部CPC立刻同步。只是在某些特定的阶段,比如在飞机从巡航开始下降之后当主用CPC已经进入了下降模式的时候,CPC转换程序能确保两部CPC都进入下降模式,从结果上看,两部CPC确实“同步”了,所以才会给大家造成误解。大家一定要知道,转换CPC这个操作并不是在所有情况下都能让两部CPC同步,比如说中止进近之后的转换,后面会详细分析。
写到这里忍不住吐槽一下公司的手册,连猜带蒙才大致看懂写的什么意思:

了解了CPC转换并不一定能使两部CPC同步这个原理,我们再看一下中止进近之后的CPC转换程序:
为什么我说这个程序存在BUG?下面我会通过两起典型的案例分析来解释这个问题。
首先看一下空客A320飞机的CPC转换逻辑图
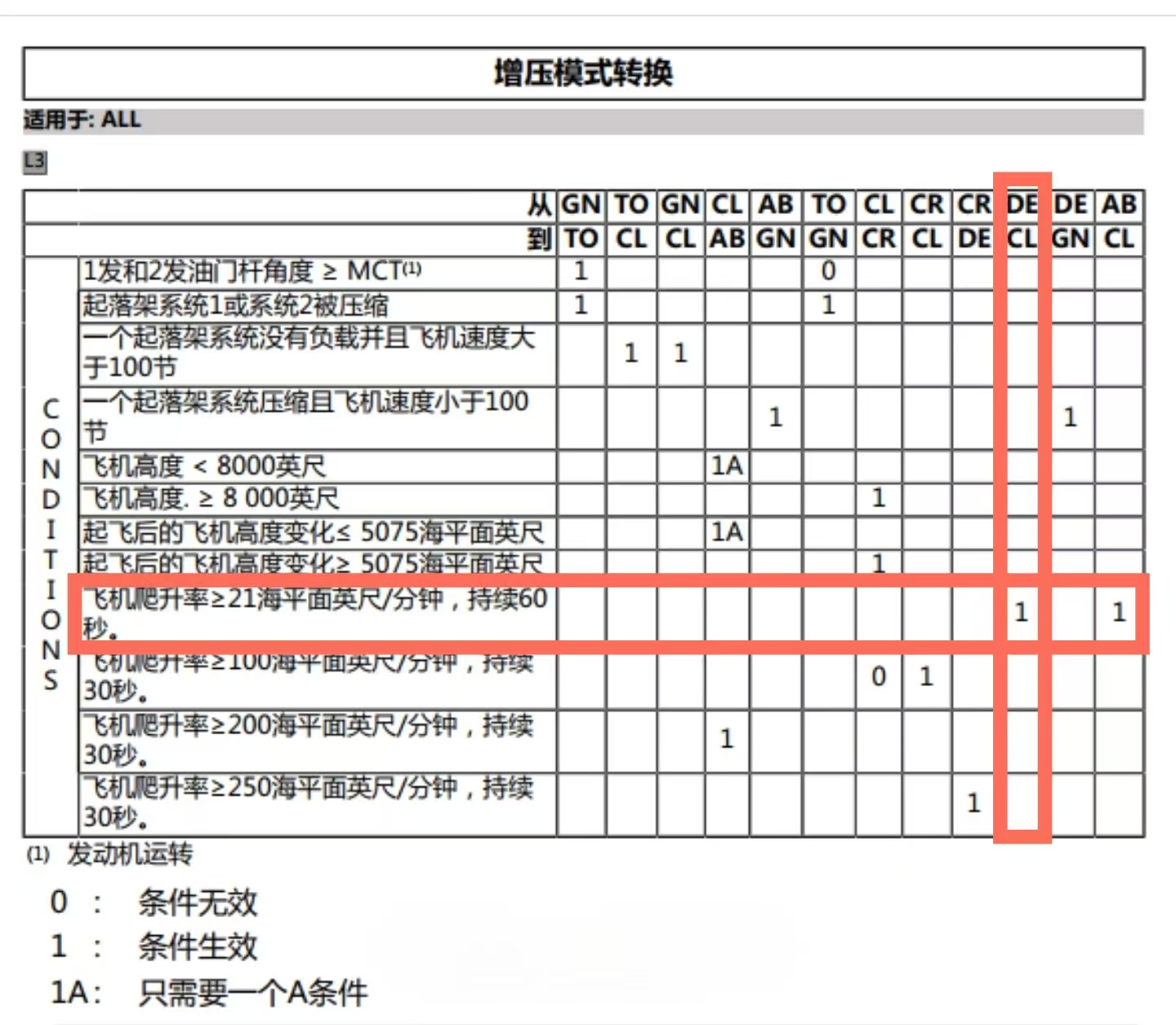
从这个图表中可以看到CPC从下降模式进入上升模式需要探测到持续60秒的飞机爬升,所以中止进近之后如果只上升60秒左右改平,就会导致两部CPC有可能其中一部进入了上升模式而另一部却停留在下降模式。一共有四种可能性:
A.两部都进入了上升模式
B.两部都停留在下降模式
C.主用进入了上升模式而备用停留在下降模式
D.主用停留在下降模式而备用进入了上升模式
其中A和B两种情况下两部CPC处于“同步”状态,所以不管是否转换CPC都不会触发假警告。只有当C或者D两种情况出现时,才有可能触发这个警告。
先说情况D,这个案例是我亲自遇到的,2022年2月在邦达中止进近,改平之后未进行CPC转换(当时手册中还没有中止进近之后的CPC转换程序)。当时是从6300米上升到6600米,只上升了1000英尺就改平(爬升过程大概60秒左右),刚中止进近的时候两部CPC都处于下降模式,座舱高度13800ft。飞机上升一段时间之后备用CPC探测到了超过60秒的持续爬升,进入了爬升模式。但是主用CPC却由于未探测到持续60秒的爬升,还停留在下降模式,所以座舱高度也一直保持在13800ft没有下降。飞机在6600米改平之后不久,备用CPC进入了巡航模式,触发了“座舱高度过高”的警告。如果当时我们改平之后立即(备用CPC进入巡航模式之前)进行一次CPC的转换,就能避免这个假警告。
再说情况C,这个案例是2024年2月在拉萨中止进近,改平之后机组进行了CPC转换,在转换完CPC后不久触发了警告。当时是从6900米爬升到7200米,同样也是只上升了1000英尺就改平(爬升过程大概60秒左右),刚中止进近的时候两部CPC都处于下降模式,座舱高度11300ft,CPC2为主控,CPC1为备用。随后CPC2探测到爬升时间超过了60秒,进入到了上升模式,于是CPC2控制座舱高度下降到目标高度8000英尺。CPC1直到飞机改平都没有探测到60秒的持续爬升,所以未能进入上升模式,仍然停留在下降模式。改平之后不久CPC2从上升模式转为巡航模式,但是CPC1仍然停留在下降模式(因为下降模式无法直接跳到巡航模式)。当座舱高度下降到8500ft时,机组转换CPC,导致处于下降模式的CPC1成为了主控,处于巡航模式的CPC2被转换到了备用,成为主控的CPC1(下降模式)控制座舱高度从8500ft再次转为上升,当座舱高度上升到9550英尺时,处于备用状态的CPC2(巡航模式)触发了警告。
通过上面的案例分析我发现:情况C如果不转换CPC不会出现警告,转换之后反而会触发警告。情况D不转换CPC会出现假警告,如果转换则能避免这个警告。但是目前的FCOM手册的程序并没有区分这两种不同的情况,统一要求机组在改平之后进行CPC转换。也就是说机组现在所执行的这个程序,在某些情况下能避免假警告,但是在某些情况下不仅不能避免警告,反而还会导致假警告。
以上分析都是我个人的理解,不一定正确,因为缺乏更多的技术资料和案例可查阅,但是根据目前我所知的这几起案例,以上整个分析过程从逻辑上是能自洽的。如果大家有不同看法,请留言指出,不吝赐教!